工具坐标系是把机器人腕部法兰盘所握工具的有效方向定为Z轴,把坐标定义在工具尖端点,所以工具坐标的方向随腕部的移动而发生变化工具坐标的移动,以工具的有效方向为基准,与机器人的位置姿势无关,所以进行相对于工件;2拟人化工业机器人在机械结构上有类似人的行走腰转大臂小臂手腕手爪等部分,在控制上有电脑此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器力传感器负载传感器视觉传感器;180的旋转运动腕部的驱动方式采用直接驱动的方式,由于腕部装在手臂的末端,所以必须设计的十分紧凑可以把驱动源装在手腕上机器人手部的张合是由双作用单柱塞液压缸驱动的;机器人重复定位精度±005mm 移动机构重复定位精度±01mm 变位机重复定位精度±01mm 工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种。
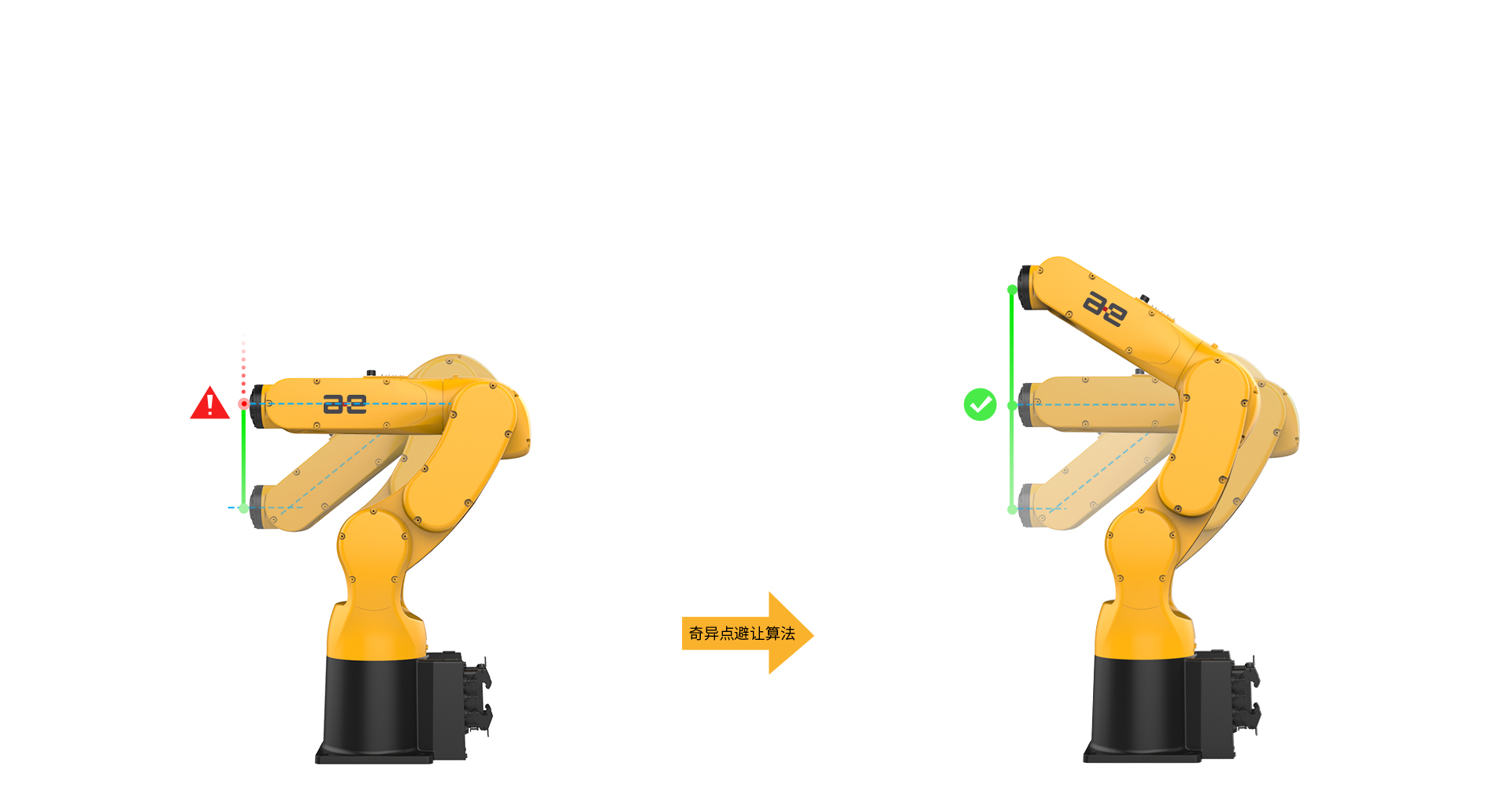
六轴关节机器人的机械结构六个伺服电机直接通过减速器同步带轮等驱动六个关节轴的旋转六轴工业机器人一般有6个自由度,常见的六轴工业机器人包含旋转S轴,下臂L轴上臂U轴手腕旋转R轴手腕;工业机器人工作原理图2机器人手臂执行机构的组成手腕部连接手和手臂的部件主要用于调整抓取物体的方向手臂部它是支撑被抓取物体的手腕的重要部分通过与驱动装置配合,可以实现各种动作手部与待操作物体接触。

构造与分类 工业机器人由主体驱动系统和控制系统三个基本部分组成主体即机座和执行机构,包括臂部腕部和手部,有的机器人还有行走机构大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度驱动。








评论列表